
Portfolio
About Me
Hello there! I am a Robotics Software engineer at Terran Robotics. I graduated from University of Pennsylvania majoring in Robotics. I have had the opportunity to be a part of multiple projects affiliated to GRASP robotics lab at UPenn. My projects have exposed me to various topics related to motion-planning, perception, computer vision and controls. In my leisure time, I like to go on hikes and play soccer. I am also a big motorsports racing fan.
Education
University of Pennsylvania | GPA: 3.76/4.0 Aug 2021 - May 2023
MS in Mechanical Engineering and Applied Mechanics (Robotics)
MS in Mechanical Engineering and Applied Mechanics (Robotics)
Experience 

- Developed a depth-image based neural network leveraging multimodal data to optimize hammer operations for shaping earthen clay into construction walls, achieving 40% speed improvement and deployed the solution using TensorRT.
- Built a GTSAM-based ROS2 localization package using AprilTags for 10 Hz pose estimation with 5 mm accuracy, fusing pose estimates with a custom neural network-predicted odometry via Extended Kalman filter.
- Designed an online A* based obstacle avoidance planner to navigate across walls on a construction build site.
- Developed a gradient descent-based optimization algorithm for extrinsics calibration, correcting rotational bias by aligning estimated camera poses with actual poses using AprilTag grid and PnP.
- Developed Python scripts for deploying services on Kubernetes with CI/CD integration and an optimized pipeline to fetch data from MongoDB and train neural networks on Google Cloud Platform.
- Architected pipeline to convert stl CAD files of house walls to 2-dimensional goal depth maps for planning operations.
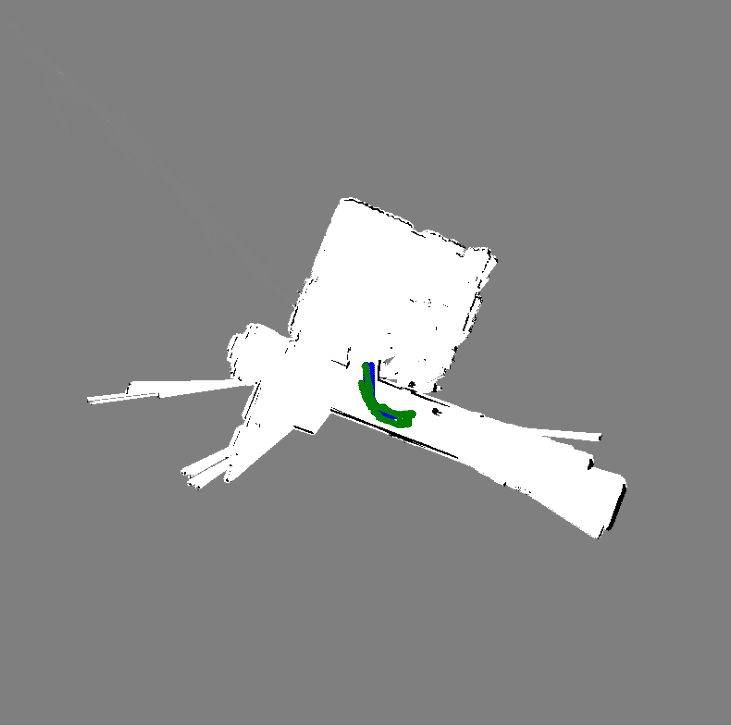
- Built a novel algorithm to detect rebar intersections and pose from noisy pointclouds real-time (6 FPS) in a densely multilayered rebar network on quadraped robot.
- Developed end-to-end pipeline to get the pointcloud of construction sites using photogrammetry.
- Achieved 1st place in the 12th F1Tenth Autonomous Grand Prix at the CPS-IoT 2023 conference.
- Implemented a finite state machine to switch between overtaking, adaptive cruise control and pure pursuit modes on an F1Tenth car.
- Enhanced the accuracy of Local-INN model to predict pose at 40 Hz from 2D LiDAR scans with IMU fusion using UKF. Deployed the neural network using TensorRT on the F1Tenth car for real-time validation.
Projects 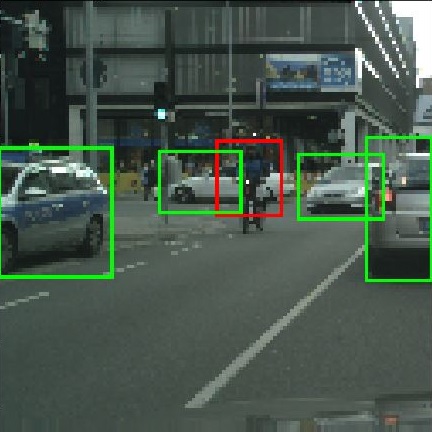


Object Detection and Instance Segmentation
- Implemented a Mask-RCNN pipeline from scratch for object detection and instance segmentation, including architecture development, pre-processing, and post-processing, and successfully trained the model on the COCO dataset. 🔗GitHub
- Developed a YOLO-v1 object detection pipeline from scratch, including network architecture, loss function implementation, and data augmentation pipeline, achieving mAP of 0.43. 🔗GitHub
- Built a SOLO instance segmentation pipeline from scratch, implementing the network architecture, FPN backbone, and matrix NMS post-processing for efficient instance mask prediction on COCO dataset. 🔗GitHub
LLMs
- Llama2 : Scripted Llama2.7B in pytorch from scratch implementing KV cache, rotary positional encoding. Used pretrained weights for inference validation. 🔗GitHub
- Vanilla-transformer : Implemented Attention is all you need from scratch and utilized Distributed Parallel Data training to train the model on multiple GPUs on AWS instance for a language translation task. 🔗GitHub
Pointcloud Pointpainting
- Fused LiDAR and Camera data to paint pointcloud as per semantic information from images to classify each point using SegFormer on KITTI dataset. Obtained segmented BEV for the autonomous vehicle. 🔗GitHub
3D Reconstruction
- Deployed a NeLF model on an M1 chip using LensStudio and ONNX after applying knowledge distillation and model pruning, reducing the model size to 9MB (down from 125MB in MobileNeRF) and improving framerate by 10 FPS. 🔗GitHub
- Implemented tinyNeRF pipeline in Pytorch to generate novel views of scene and pointcloud. 🔗GitHub
- Implemented 3D reconstruction using two-view and multi-view stereo with plane sweep algorithm. 🔗GitHub
Quadrotor Navigation and Control
- Implemented geometric non-linear controller for collision-free quadrotor navigation along optimal trajectories generated using A* path planning and trajectory smoothing. 🔗GitHub
- Implemented stereo MSCKF visual-inertial odometry for robust high-speed robot pose estimation. 🔗GitHub
- Implemented Unscented Kalman filter for 3D orientation tracking using IMU sensor data, with model parameters learned from Vicon motion capture ground truth. 🔗GitHub
SLAM using Particle Filter for Humanoid Robot
- Implemented particle filter SLAM for a THOR-OP humanoid robot using IMU and LIDAR data. The system performs real-time obstacle mapping and robot localization through scan matching and map updates. 🔗GitHub
Autonomous Pick and Place Challenge
- Developed a library for controlling Franka Panda Arm to efficiently pick static and dynamic blocks using apriltags and place them on table. Project code available on 🔗GitHub
- Developed and implemented a Model Predictive Control (MPC) system for a 7-DoF robotic manipulator, enabling collision-free trajectory planning in obstacle cluttered environments. 🔗GitHub